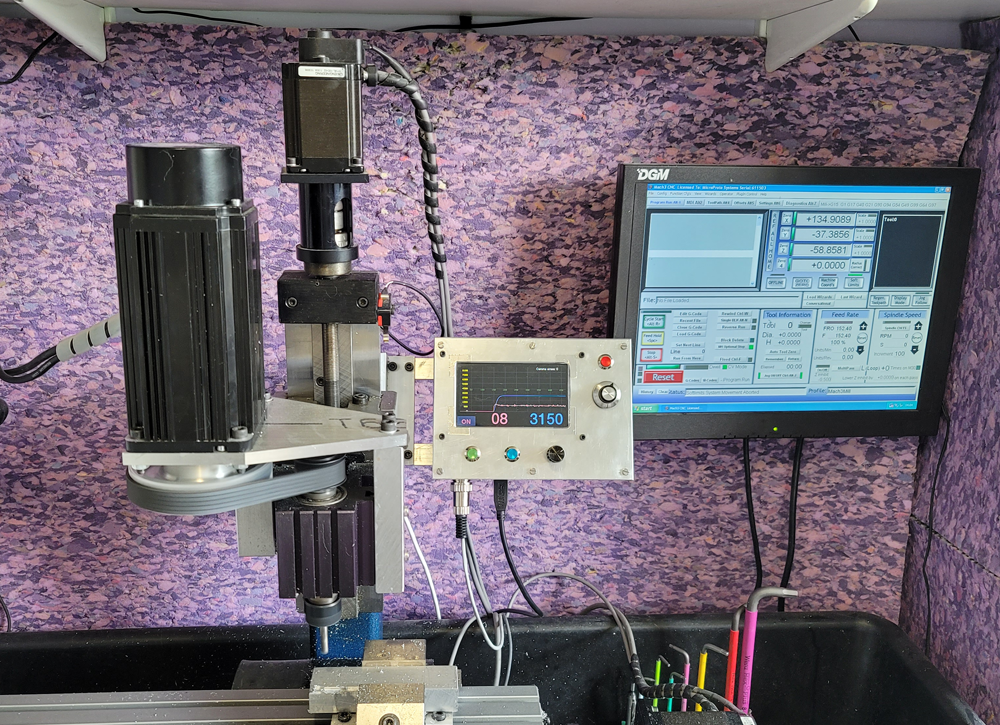
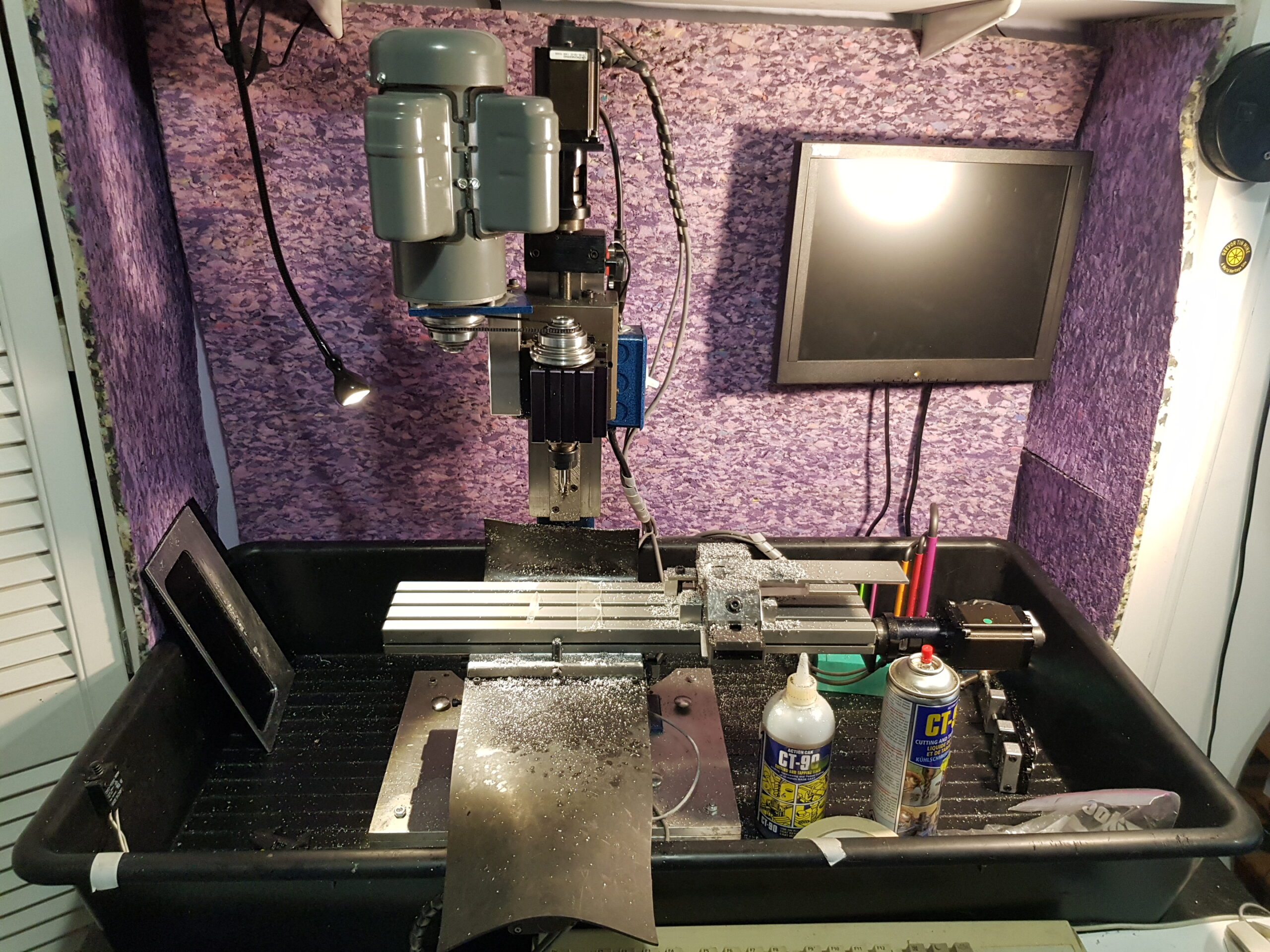
The Taig milling machine comes with a 1/4HP (186 Watts) motor. This motor works great with the...
In 2019 I purchase a Sherline CNC milling machine from Ebay. It was my first go at...
The Anycubic Photon is a great, very inexpensive resin 3D printer. I got it to try and...

These are most of my android test devices I have collected over the years to fix strange...
One QuadServo board being used to control 3 custom servo motors Hardware For a robotics...
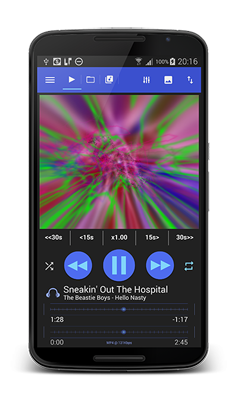
I released a new app – Long Music Player, check it out: http://www.longplayerapp.com/

Overview Quad Bot is a small robot designed and built from scratch. It has a simple...
This information was contained in my Quatbot project post, but I have moved it here instead. I...

I have finally made a blog for an Android game I have been making for the past...
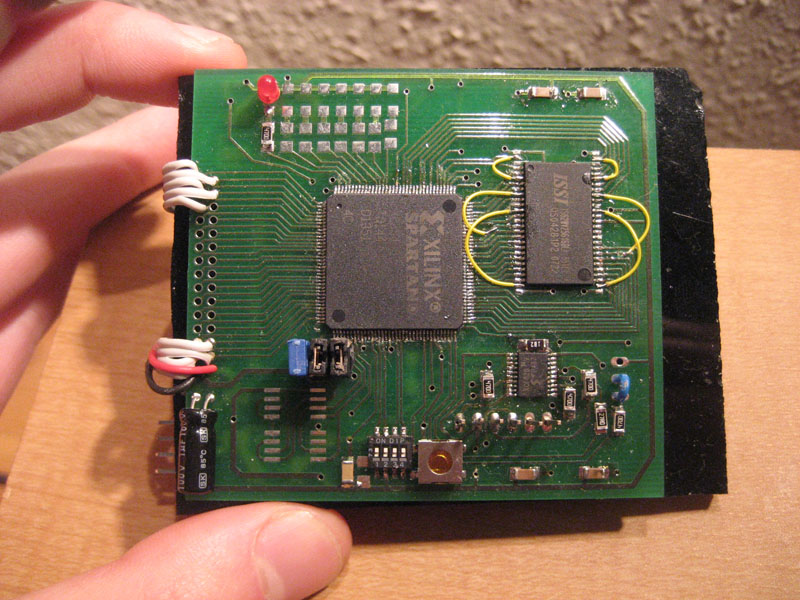
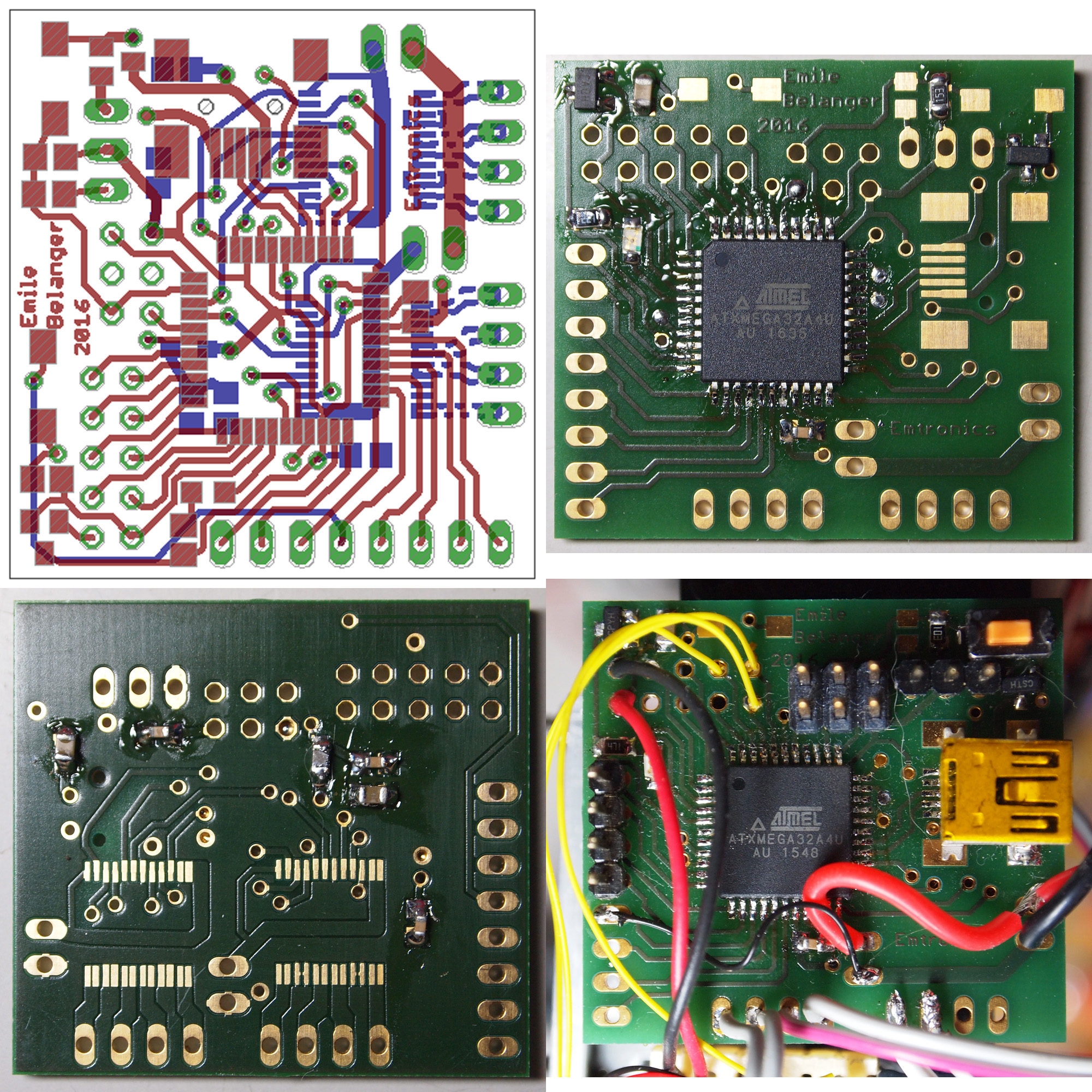
Introduction I designed a small (70mm X 65mm) FPGA board around a Xilinx Spartan 3 FPGA. I...

Introduction I got given a Panasonic PT-AE500E projector as it was ‘broken’. As you have probably guessed,...
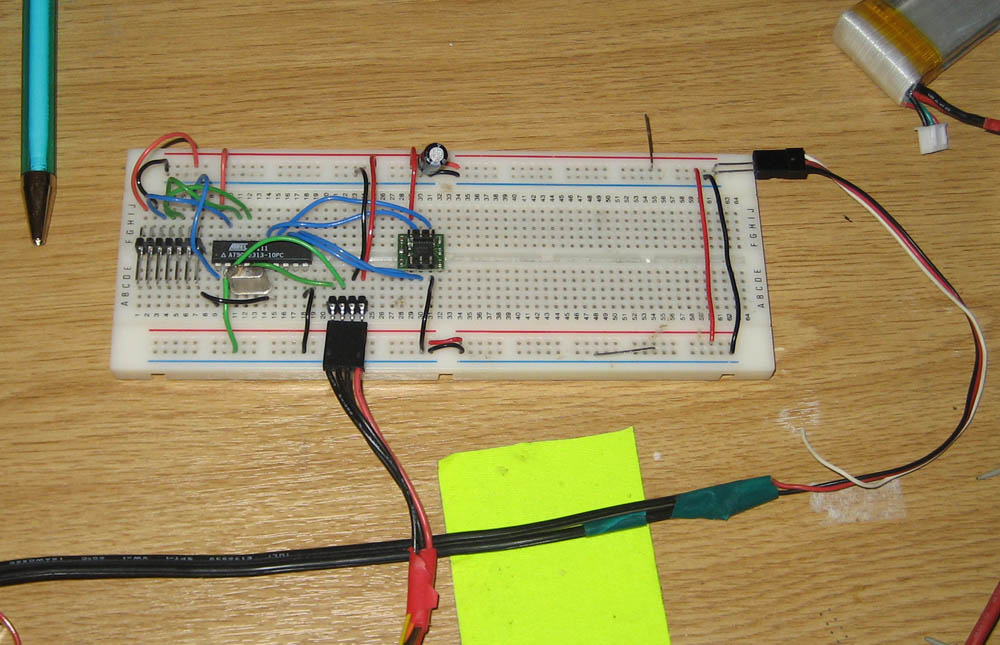
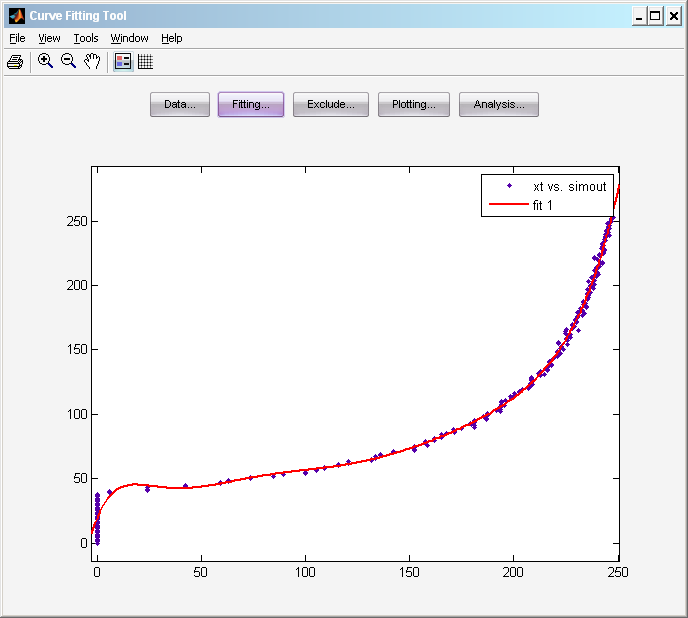
Introduction I received a Parallax HM55B compass module and wanted to quicky test it out, so I...
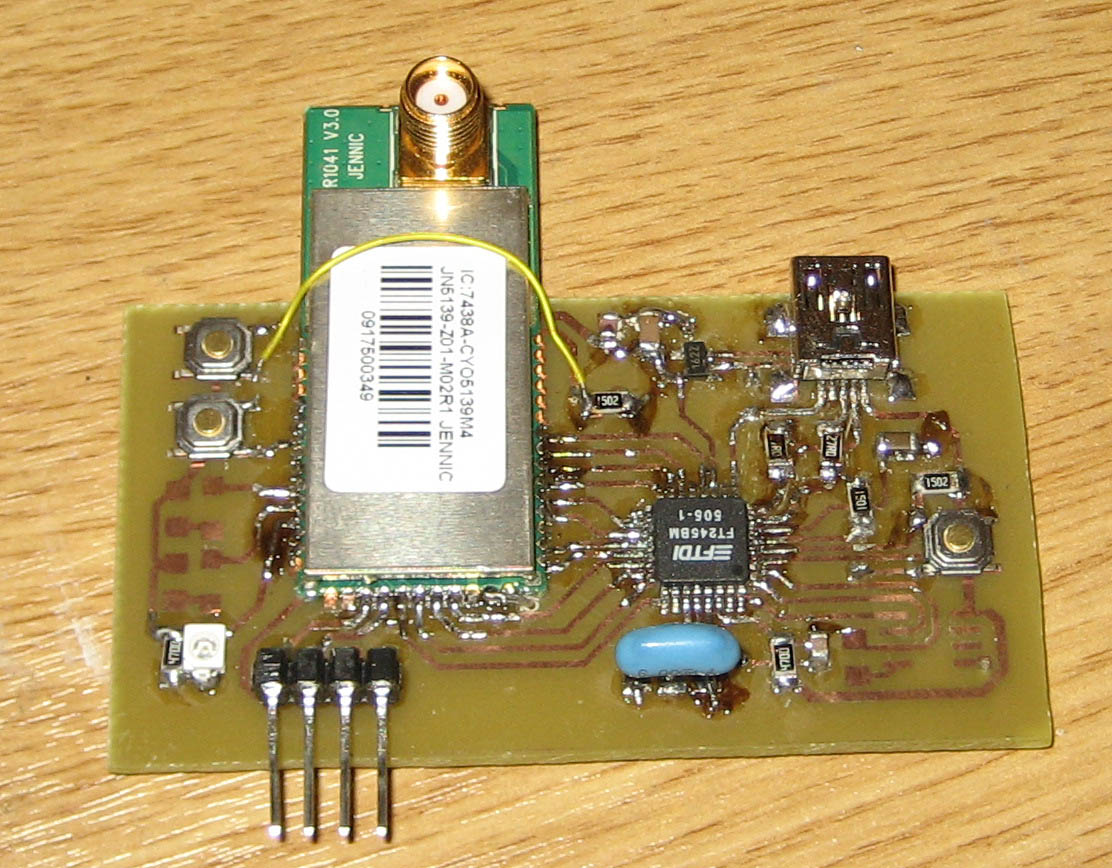
Introduction I built this interface board to allow faster, easier communication to a PC from a Jennic...

Introduction As I was riding into work during the winter, I wanted to try and reduce my...